Realizing high-resolution programmable matter requires millimeter-scale catoms. Within the Claytronics project led by Carnegie Mellon University, researchers have developed and demonstrated millimeter-scale cylindrical catoms that are electrostatically actuated and self contained. As a simplified approach cylindrical catoms were first built instead of spheres. We name here these cylindrical catoms the 2D Catoms.
Hardware Features
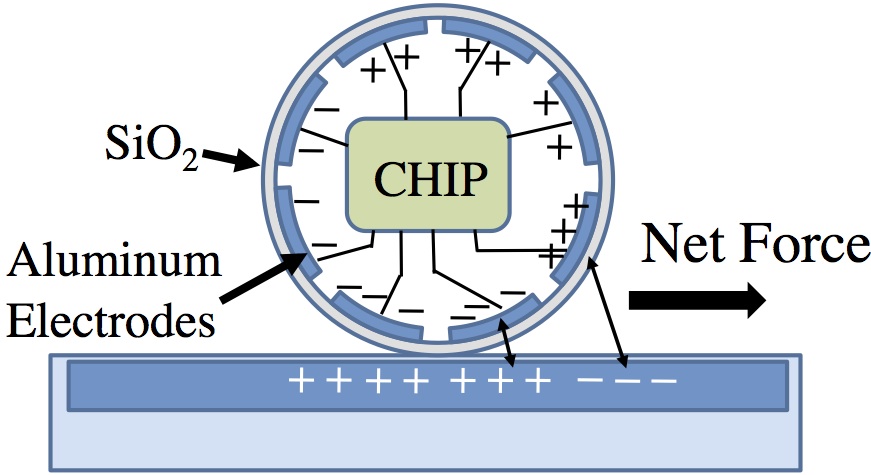
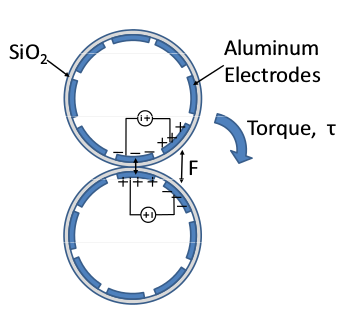
2D Catoms have been partially validated with the realization of a hardware prototype. A 2D Catom consists of a 6-mm long-and 1-mm-diameter cylindrical shell. A high-voltage CMOS die is attached inside the tube. The chip includes a storage capacitor and a simple logic unit. The tube uses electrodes for power transfer, communication and actuation. In the current design, a 2D Catom can roll on a power grid. A 2D Catom is theoretically able to perform a revolution in 1.67 seconds or 3.35 seconds.

Videos
2D Catom rolling on a power grid: http://www.cs.cmu.edu/~claytronics/movies/1X_tube_back-and-forth.avi
Publications
Karagozler, M. E. (2012). Design, Fabrication and Characterization of an Autonomous, Sub-millimeter Scale Modular Robot. PhD thesis, Carnegie Mellon University.
Karagozler, M. E., Thaker, A., Goldstein, S. C., & Ricketts, D. S. (2011, May). Electrostatic actuation and control of micro robots using a post-processed high-voltage soi cmos chip. In Circuits and Systems (ISCAS), 2011 IEEE International Symposium on (pp. 2509-2512). IEEE.
Karagozler, M. E., Goldstein, S. C., & Reid, J. R. (2009, October). Stress-driven mems assembly+ electrostatic forces= 1mm diameter robot. In Intelligent Robots and Systems, 2009. IROS 2009. IEEE/RSJ International Conference on (pp. 2763-2769). IEEE.
Karagozler, M. E., Campbell, J. D., Fedder, G. K., Goldstein, S. C., Weller, M. P., & Yoon, B. W. (2007, October). Electrostatic latching for inter-module adhesion, power transfer, and communication in modular robots. In Intelligent Robots and Systems, 2007. IROS 2007. IEEE/RSJ International Conference on (pp. 2779-2786). IEEE.